STIFF FLOP
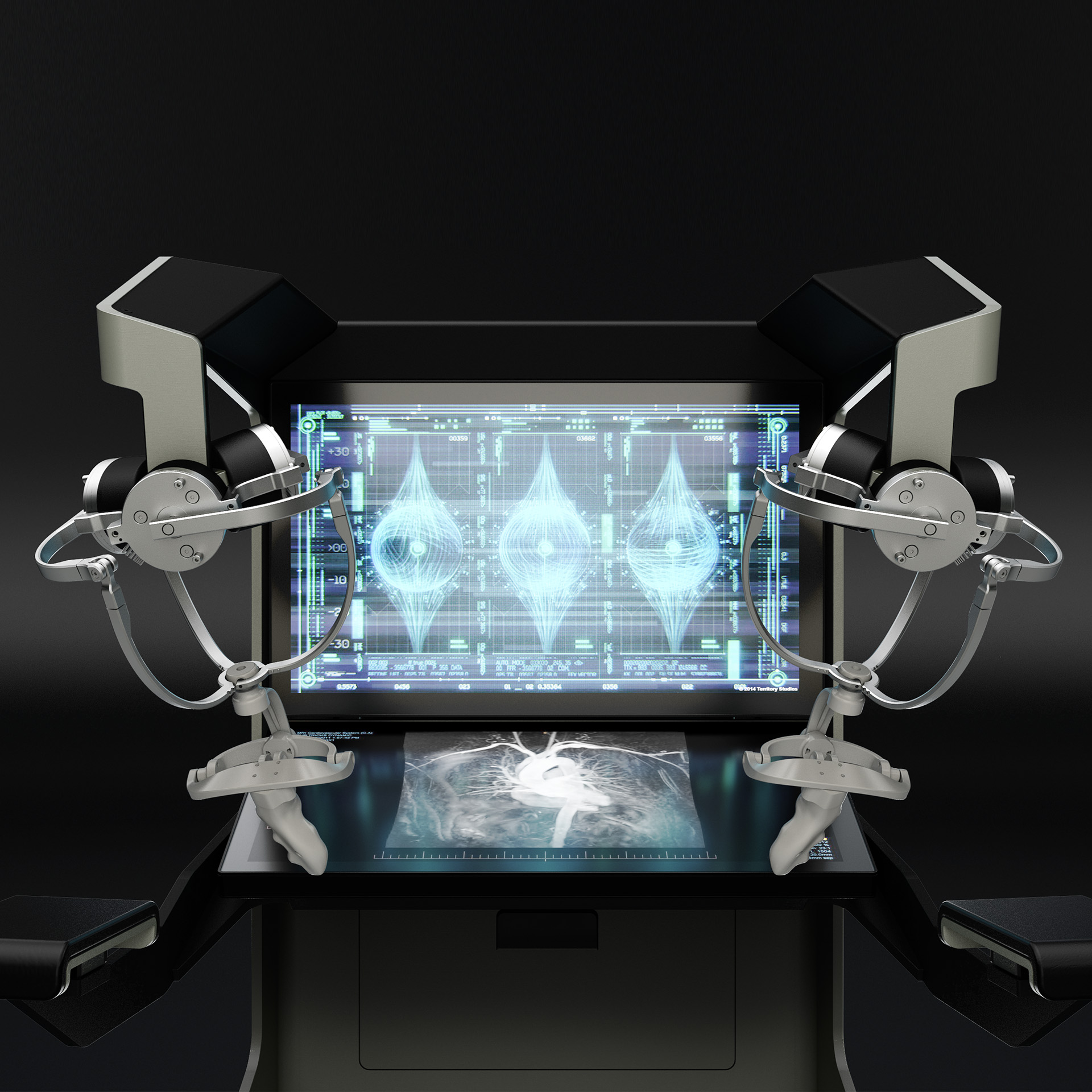
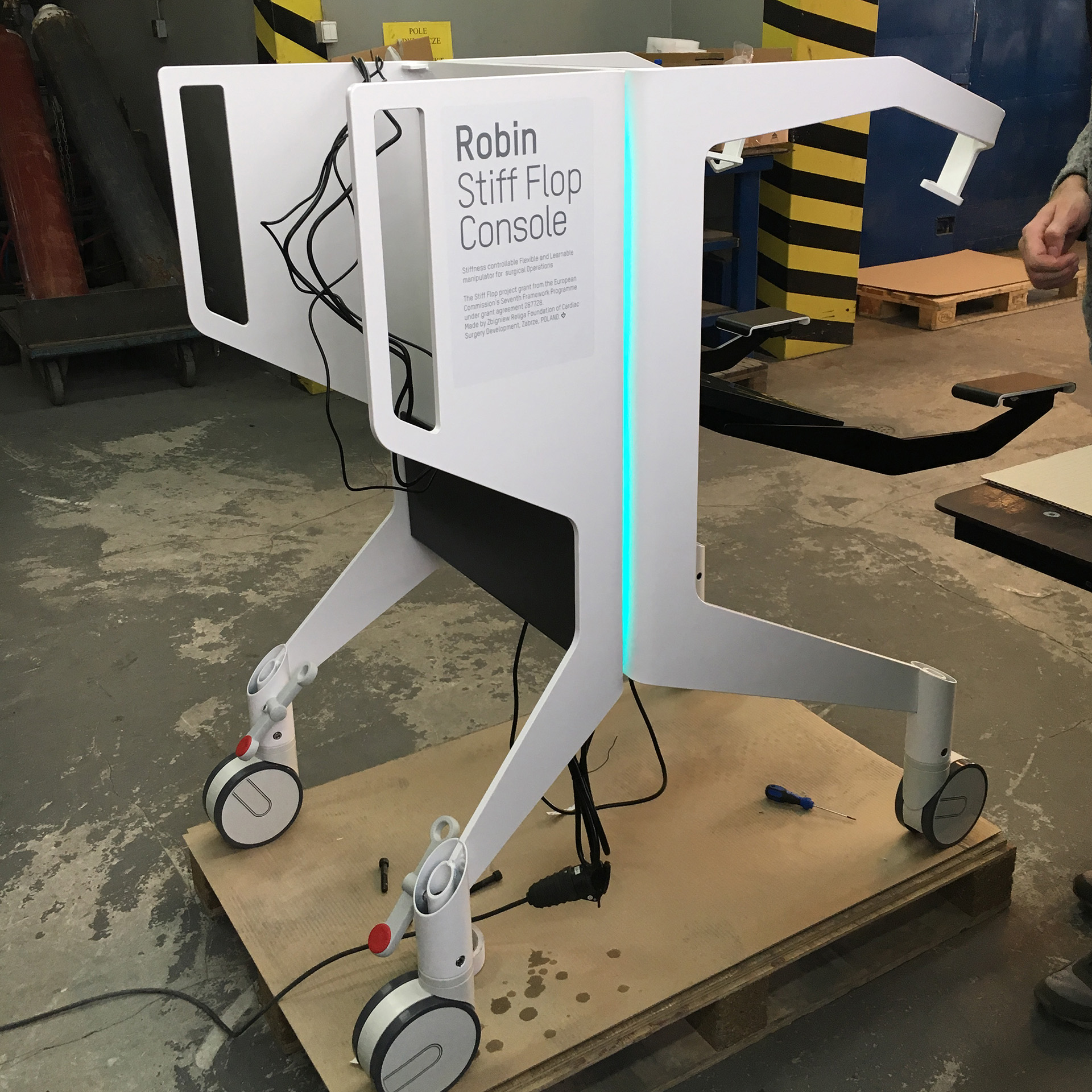
Surgeon console for the stiffness controllable flexible and learn-able manipulator for surgical operations. An advanced medical instrument supports advancements in medical procedures.
STIFF-FLOP: STIFFness controllable Flexible and Learnable Manipulator for surgical OPerations. ‘STIFF-FLOP’ is a highly flexible robotic arm able to adjust its rigidity and capable of learning, allowing it to perform surgical procedures. The STIFF-FLOP project aims to develop a robotic arm with the aforementioned features so that compliance with its environment complements its ability to execute complex surgical maneuvers. Modern laparoscopic and robot-assisted surgical systems have restricted access through Trocar posts. Along with a lack of haptic feedback and the inherent problems of operating a rigid tool in a confined yet delicate space, exposes today’s surgical limitations. However, biological “manipulators” like the octopus arm and the elephant trunk, can control the stiffness of selected body parts, giving them an inherently compliant nature when interacting with objects. The STIFF-FLOP project is pushing a new era of robotics that focuses on the plasticity and dexterity of the tool, which shows great promise for minimally invasive surgeries, as well as other applications. Through the Foundation of Cardiac Surgery Development, SOKKA was asked to participate in the STIFF-FLOP project by designing the surgical console exterior that links to a remote tele-control over an FRK-PIAP connection via a Virtual Private Network. The resulting console supports surgeons through its myriad of adjustments which helps them adjust their reach. The final design features a portable console containing a built-in computer unit, two touch screens, and two wrist-mounted instruments which include: manipulators/ joysticks/ steering manipulators. Partners: King’s College London, University of London – European Association for Endoscopic Surgery – Fundacja Rozwoju Kardiochirurgii, Foundation of Cardiac Surgery Development – Hebrew University – Italian Institute of Technology – Przemyslowy Instytut Automatyki I Pomiarów, Industrial Research Institute for Automation and Measurements – Shadow Robot Company – Tecnalia Research & Innovation – Scuola Superiore Sant’Anna, The BioRobotics Institute – University of Torino – University of Surrey – University of Siegen.
Did you know?
The world’s first laparoscopic surgery was performed on a dog in Dresden Germany in 1905 and the first human in 1910. The use of small tools and a tiny camera inserted into a small incision in patients to perform the surgery has since led to reduced pain and quicker recovery times.
Year
2015
Date
September 10, 2015
Category
Industrial design